大疆创始人汪滔1980年出生于杭州的一个中产家庭高中毕业后考入华东师范大学,大三的时候汪滔退又重新报考了香港科技大学。在大四那年,作为本科的毕业设计,汪滔成功开发了一套旋翼机飞行控制系统,在这一系统研究中汪滔成功地解决了航模能够自动悬停的问题,与此同时,清华、浙江大学等高校的博士团队也在研究类似课题,据传也取得了一定的成绩,但同样为学生的汪滔对商业化更为敏感,他带着研究成果参加了珠海航展和高交会并得到了部分企业的认可,这也直接驱使了汪滔创业的想法。
2006年,汪滔在读研究生课程的同时在深圳的城中村里创立了大疆,起初的两年,大疆专注于研究油动力直升机飞控系统的研究,希望能够打入政府或者大型国企等工业级的无人机市场,但成效甚微。2008年是大疆极为重要的一年,这一年汪滔研发的第一款直升机飞控系统XP3.1面市,并在8月11日申请了第一件实用新型专利“小型无人直升飞机控制系统”(CN201262709),用于解决在高机动或者GPS信号短时间中断的情况下保证飞行可靠性的问题,但这套直升机飞控系统虽然相对成熟,但并没有为此时的大疆在开拓市场方面提供太多的助力。
苦于对直升机的信心不足及公司渺茫的前途(包括外界所传的股权争议),大疆初创团队中较为重要的一员卢致辉(后面介绍艾特航空和一电时还会提到卢致辉)在2008年内离开了大疆,随后半年内,初创团队中的陈楚强和陈金颖也相继离开,这几位后来均为无人机的发展做出了不小的贡献。汪滔、陈金颖、卢致辉、陈楚强,他们在大疆创新的员工编号分别为0号、1号、2号和3号,这是大疆创新最初的创业团队。
正在大疆的核心创始团队分道扬镳的2008年,消费级无人机的概念已经悄然成型,越来越多的人钟情于研究开发这种机械简单,稳定性更易控制的多旋翼无人机。在美国,《连线》杂志主编Chris Anderson(3D Robotics的创始人,也是大疆北美市场的主要竞争者)创办了无人机爱好者的留言板DIY Drones,上面的一些用户提出无人机应该从单旋翼设计走向四旋翼设计转变,因为四旋翼飞行器价格更便宜,也更容易进行编程。
汪滔的成功之处是其并没有让大疆在直升机领域做太久的坚持(据说大疆的一位新西兰代理商告诉汪滔,他的客户中超过90%人使用多旋翼,总抱怨找不到好的飞行器),在2009年的时候大疆已开始从单旋翼设计切换到多旋翼无人机的研发,虽然汪滔是飞控的行家,但毕竟多旋翼和单翼直升机还是有很大的差异,他们不得不面临许多新的问题。对一个创业者而言,敢于放弃已有积累切换到另一条跑道是一件极具勇气的事情。
凭借着之前在飞控上的技术积累,比如其早期开发的无人直升机飞行控制系统Ace One(尽管这一控制系统的创新技术在于其软件及电路的设计,汪滔还是将其这一安装在机壳内部且不常为人所见的器件申请了外观设计专利,CN301784510S,可见大疆还是有很强的IP保护意识,这一良好基因在大疆的成长之路上无所不体现),大疆还是很快解决了多旋翼飞控系统一系列的问题,比如如何迅速及时应对外部产生的干扰以增强无人机的稳定性(CN202244078U);如何消减无人飞行器的工作振动频率对惯性传感器的影响(CN102980584A;CN202274882U),通过升力在反扭力方向上的分力提高旋转过程中响应速度(CN103359282A;CN202670095U),通过简单操作触发的指令控制无人机按照调整后的飞行速度和绕点飞行半径飞行(CN103576690A)等等。
民用消费级无人机的主要作用是用于航拍,无人机需要配置航拍稳定平台用来搭载摄像机或照相机以实现稳定拍摄,因此,对机身及负载云台的稳定与防抖性能提出了很高的要求,为了确保无人机在飞行中能够拍摄到清晰的画面汪滔亲自带队投入云台系统的研发,经过2010至2012的三年技术攻关,大疆陆续提出了以汪滔为主要发明人的三自由度航拍云台系统(CN101734377A)、陀螺式动态自平衡云台技术(CN102996983A;CN102996984A)等无电刷云台专利技术,在此基础上,大疆持续在减振增稳方面采用了诸多创新技术,比如采用电机作为原动力直接驱动云台的机架组件实现无极调节(CN202295294U),将电机及电调模块形成了模块化的一体式结构(CN202647109U),采用电滑环技术确保云台360°周向旋转而不致线缆缠绕(CN202647108U)等等,其实克服减振增稳这一技术问题是一个系统性工作,任何一个细节的改进都可能是提升技术效果的一部分,大疆正是将很多看似细枝末节的改进都视为其创新的一部分才有了产品的惊艳表现。
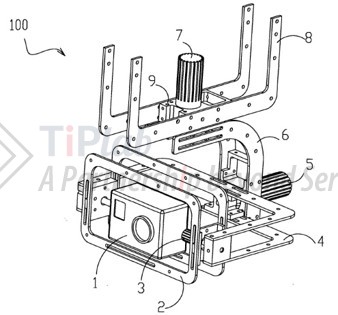
经过近几年的苦心研发大疆终于搞定了云台技术,实现了在无人机摇摇晃晃地飞行时也能确保不影响拍摄画面质量的效果,曾有网友赞誉大疆的无人机拍摄的效果就像是支在地上的三脚架。现在,云台技术已经成为大疆第二核心技术,丝毫不亚于前面提到的飞控系统。就在大疆专注于云台技术开发的时候大疆还机缘巧合地结识了一位重要的事业合伙人,在北美从事航拍业务的创业公司的Colin Guinn(科林·奎恩),后来Guinn加入大疆并帮大疆顺利地开拓了北美市场(后来Guinn因和大疆纠纷跳槽至3D Robotics)。
凭借飞控及云台系统的成功,大疆创造性地将无人机的零部件数量以及产品重量降到了极致。到2011年时大疆依据将飞行控制器的制造成本已从当初2006年的2000美元降到不足400美元,这一价格优势成为大疆后来能够迅速占领民用多旋翼市场的重要因素,而在此前,无人机的组装十分繁琐,掌握飞行技术需要学习和训练,价格又极其昂贵,因此只在专业级玩家中流行,在大疆2012年提出的专利中,有不少技术是解决用户安装起落架及螺旋桨(CN202642093U;CN202670094U;CN202642095U)等降低对用户操作难度及专业程度要求(CN203047531U;CN103576690A)的。
经过几年的蛰伏,大疆终于在2012年9月6日申请后来被命名为第一代“大疆精灵”(Phantom 1)的外观设计专利:旋翼飞行器(phantom) (CN302321461S),这一专利的授权公告恰好比第一代“大疆精灵”发布晚了几天,专利申请时机和产品发布在时间上控制得恰到好处,这也是许多企业应该学习的地方。

截止2012年的年底,大疆完成了多旋翼无人机应具备的重要技术,包括飞控系统、云台系统、驱动及电调、图传及遥控技术(CN103623593A;CN202724689U)等,在2013年1月份的时候发布了第一代“大疆精灵”(Phantom 1),这是一款对于整个行业而言有着划时代的意义的产品,该产品支持悬挂微型相机,达到航拍功用,失控情况下可实现自主返航;Phantom 1让航拍成了一件简单的事情,也让更多普通消费者接触到了无人机。凭借Phantom 1大疆正式奠定了自己的行业地位。

尽管Phantom 1是一个相当成功的多旋翼无人机,但销售的一些机型中常常会因为软件故障飞离用户的控制,作为一名追求极致的完美主义者,汪滔认为该产品“并不完美”,他要求其研发团队日以继夜地开发他认为可以真正引以为豪的产品,当然后来的事实证明大疆确实做到了。
欲知后事如何,请听Zach君下回分解。
* 以上文字仅为个人意见,不代表本公司观点,亦不构成法律意见或咨询建议。